STEROWNIE PODNOŚNIKIEM PALECIAKIEM
JAK ZAPROGRAMOWAĆ STEROWANIE PODNOŚNIKIEM PALECIAKIEM W APLIKACJI LOFI BLOCKS?
Podnośnik paleciak to najbardziej rozbudowana konstrukcja z zestawu CODEBOX Drive. Dzięki mechanizmowi podnośnika widłowego może on dźwigać i przewozić lekkie przedmioty zamocowane na małych euro-paletach, dzięki czemu świetnie nadaje się do organizowania różnego rodzaju zabaw i zawodów w dostarczanie towarów na czas.
Przygotowanie
1. Zmontuj konstrukcję pojazdu i podnośnika widłowego
2. Silnik serwo sterujący podnośnikiem podłącz do OUTPUT1, diodę zieloną podłącz do OUTPUT2, diodę czerwoną podłącz do OUTPUT3
3. Powerbank zamocowany z tyłu pojazdu wysuń jak najmocniej na zewnątrz tak, aby stanowił on przeciwwagę dla podnoszonych towarów.
Programowanie
Sterowanie podnośnikiem jest praktycznie takie samo, jak zwykłym pojazdem, dochodzi do niego jednak jeszcze sterowanie silnikiem wchodzącym w skład mechanizmu podnośnika.
Ponieważ podnoszenie towarów jest zadaniem, które wymaga dużo precyzji, zależy nam na tym, aby sterowanie naszym pojazdem było jak najdokładniejsze, czyli najlepiej, aby poruszał się jak najwolniej. Ustawiamy więc moc silników na możliwie jak najniższą wartość, pamiętając jednocześnie, że kiedy moc ta będzie zbyt niska, to silnik nie będzie w stanie ruszyć z miejsca, w praktyce więc operujemy mocą silnika w granicach 50-70 procent.
Sterowanie pojazdem
Pierwszą część naszego programu stanowić będzie zaprogramowanie standardowego sterowania pojazdem przy pomocy strzałek na klawiaturze (lub wbudowanego gamepada w wersji mobilnej LOFI Blocks).
Działanie tego programu omówiliśmy w lekcji o sterowaniu pojazdem, gotowy schemat blokowy wygląda tak:
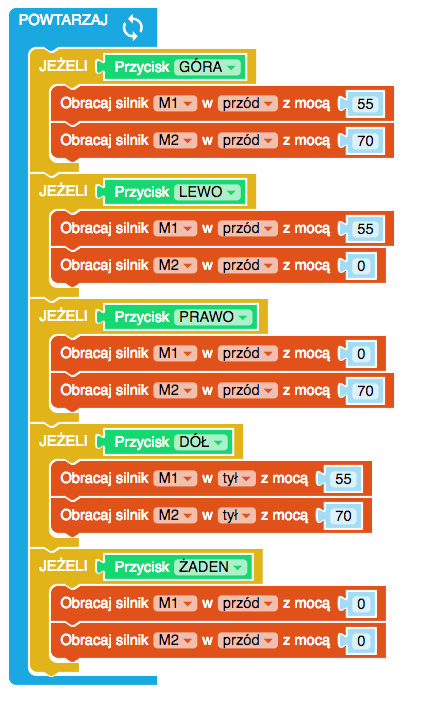
Zwróć uwagę na dwie rzeczy:
– w przypadku jazdy do przodu (i innych kierunkach też) moc silników ustawiona jest na różne wartości – wynika to z faktu, że silniki DC różnie reagują na zmianę mocy dlatego aby robot jechał prosto do przodu trzeba doświadczalnie dobrać różne moce silników, mogą się one między sobą różnić nawet o kilkanaście procent – UWAGA! w przypadku Twojego robota te wartości mogą być inne, musisz dobrać je samodzielnie
– w przypadku skręcania w lewo i prawo tylko jeden silnik się kręci a drugi stoi w miejscu – dzięki temu obrót robota jest wolniejszy i łatwiej nim sterować
Sterowanie podnośnikiem
Kolejnym etapem naszego programu jest zaprogramowanie działania podnośnika widłowego. Sterujemy nim przy pomocy silnika serwo podłączonego do OUTPUT1. Chcemy aby podnośnik ustawiał się na dwie pozycje – dolną do ładowania to kolejnym kroku musimy sprawdzić, jakie wartości położenia silnika i podnośnika będą odpowiednie. Roboczo wrzuć do pętli powtarzaj blok USTAW SERWO i posprawdzaj różne wartości położenia silnika.arów i górną do jazdy z ładunkiem, będziemy je zmieniać przy pomocy klawiszy Z i X (lub A i B w wersji mobilnej)

W moim przpadku przyjmuję:
– serwo w pozycji 100 – podnośnik podniesiony
– serwo w pozycji 20 – podnośnik opuszczony
UWAGA – zwróć uwagę, że podnośnik w pozycji 0 obniża się do poziomu, w którym jes poniżej dolnej krawędzi kół więc zaczyna podnosić cały pojazd i jazda jest niemożliwa, dodatkowo aby podnośnik był w stanie wsunąć widły do środka palety musi on być lekko uniesiony ponad powierzchnię podłoża
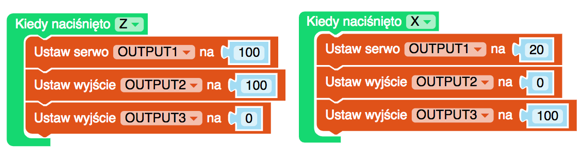
Do sterowania podnośnikiem możemy wykorzystać blok KIEDY NACIŚNIĘTO KLAWISZ… z kategorii ZDARZENIA Określamy, że naciśnięcie klawisza Z ustawia serwo na pozycję 100, czyli podnosi widły do góry, a klawisz X ustawia serwo na pozycję 20, czyli opuszcza widły na dół.

Żeby nasza konstrukcja była ciekawsza dodajmy jeszcze sygnalizację świetlną – w pozycji górnej podnośnika świeci się dioda zielona (gotowy do jazdy), w pozycji dolnej podnośnika świeci się dioda czerwona (uwaga trwa załadunek!)
W programie wygląda to następująco:
– kiedy naciśnięto klawiz Z – podnieś widły, zapal diodę zieloną, zgaś diodę czerwoną
– kiedy naciśnięto klawisz X – opuść widły, zgaś diodę zieloną, zapal diodę czerwoną